异形钢结构三维激光扫描是一种利用激光扫描技术获取异形钢结构表面三维数据,进而构建精确三维模型的方法,在建筑、桥梁、工业设施等领域具有重要应用价值。以下从技术原理、应用场景、优势、实施流程、挑战与解决方案几个方面展开介绍:
技术原理
三维激光扫描技术基于激光测距原理,通过向目标物体发射激光束,并测量激光束从发射到反射回来的时间,从而计算出激光点与扫描仪之间的距离。结合扫描仪自身的位置和姿态信息,可以获取目标物体表面大量点的三维坐标,这些点构成点云数据。通过对点云数据进行处理和分析,能够重建出异形钢结构的三维模型。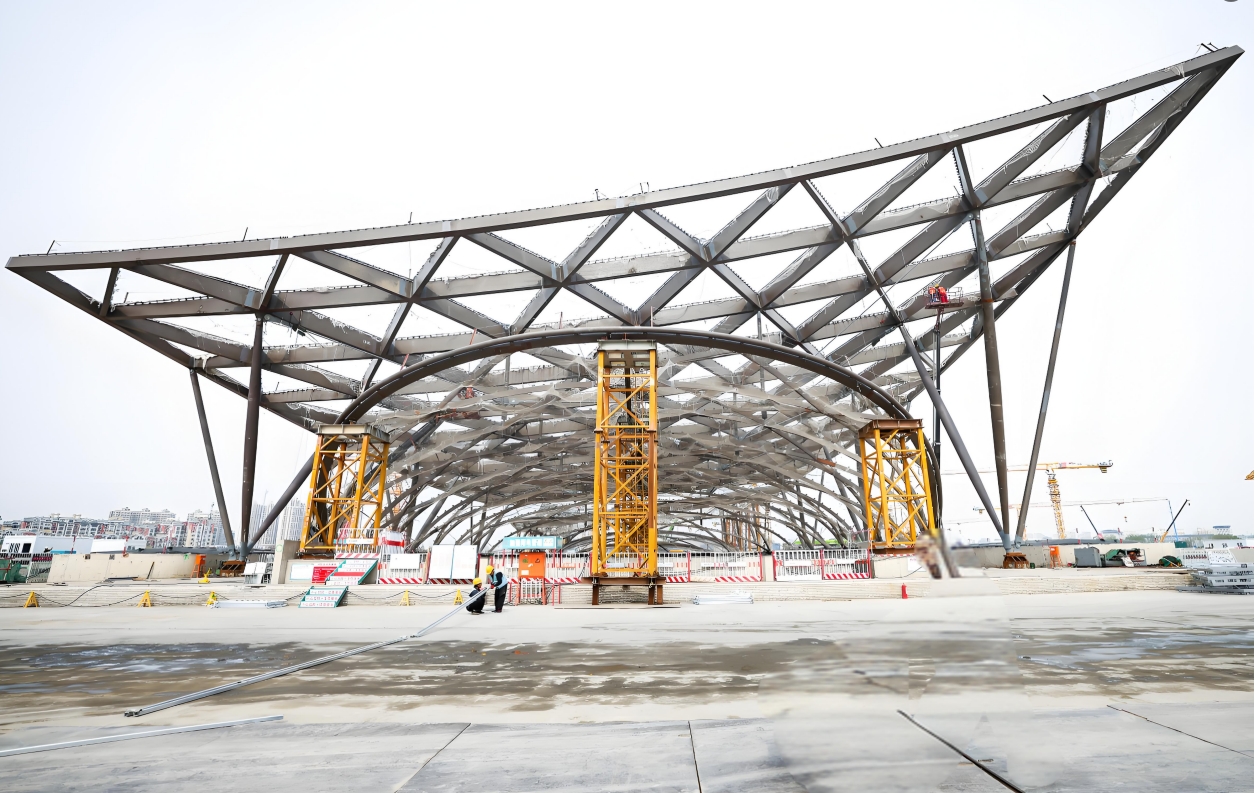
应用场景
建筑领域:在大型公共建筑、体育场馆、会展中心等项目中,异形钢结构常被用于创造独特的建筑造型。三维激光扫描可以用于施工过程中的质量检测,确保钢结构的安装精度符合设计要求;也可用于建筑竣工后的验收和改造前的现状评估。
桥梁工程:对于一些造型复杂的异形钢结构桥梁,如斜拉桥、悬索桥的索塔、拱桥的拱肋等,三维激光扫描能够准确获取桥梁结构的几何尺寸和变形情况,为桥梁的维护和加固提供数据支持。
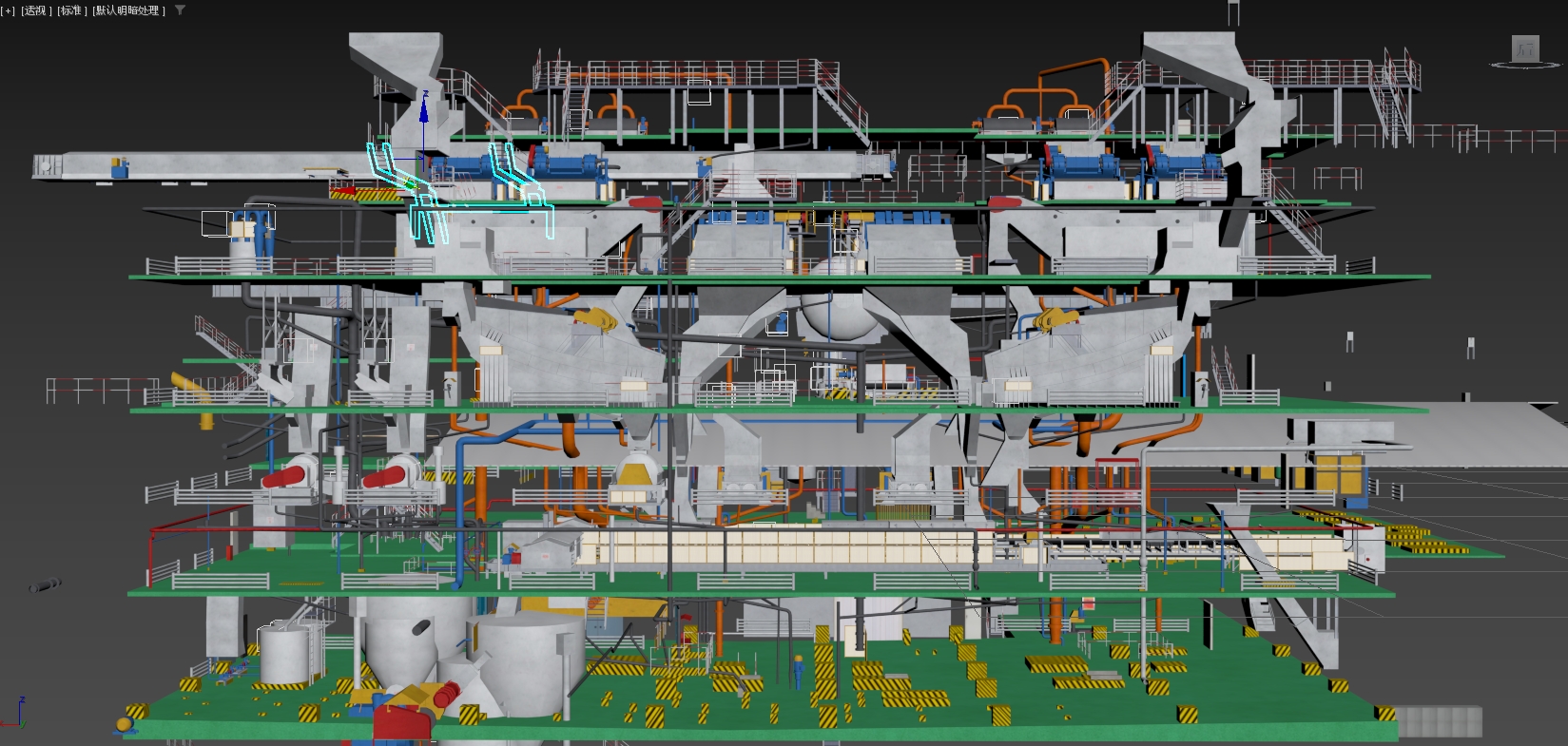
工业设施:在石油化工、电力等行业的工业设施中,异形钢结构设备支架、管道支架等较为常见。三维激光扫描可以快速获取这些结构的现状数据,便于进行设备更新、改造和安全管理。
优势
高精度:能够获取毫米级甚至更高精度的三维数据,准确反映异形钢结构的几何形状和尺寸。
非接触式测量:无需与被测物体直接接触,避免了传统测量方法可能对结构造成的损伤,同时也适用于一些难以接触或危险区域的测量。
快速高效:可以在短时间内获取大量三维数据,大大缩短了测量时间,提高了工作效率。
全面性:能够对异形钢结构的整体和局部进行全面测量,获取完整的三维信息,避免了传统测量方法可能存在的遗漏。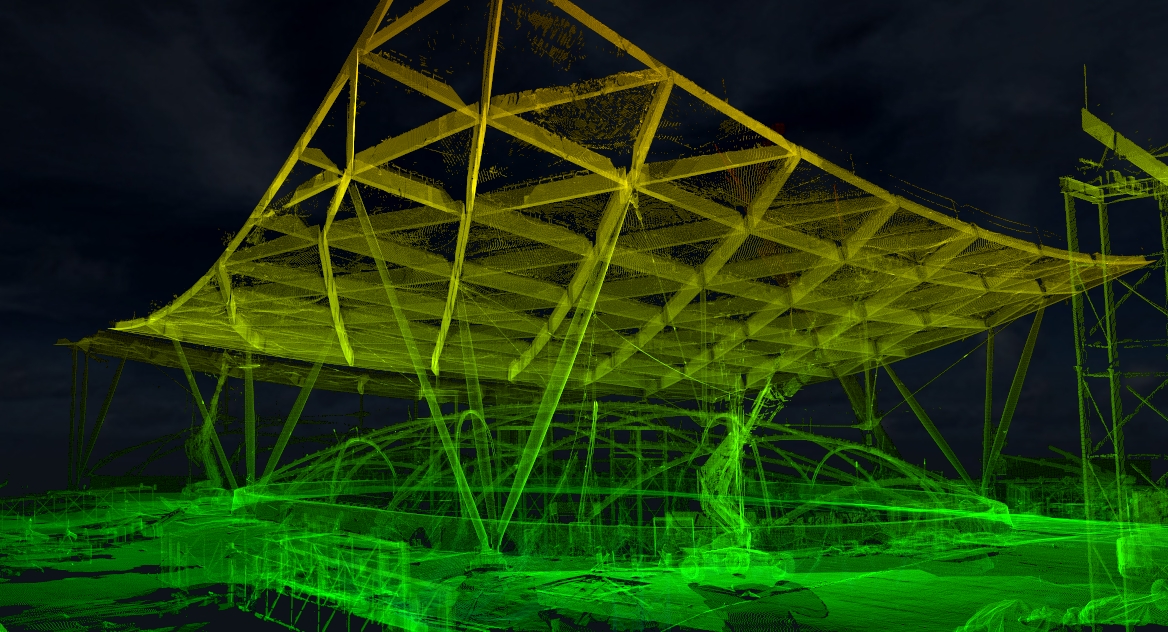
实施流程
前期准备:确定扫描范围和目标,选择合适的扫描设备和参数设置;对扫描现场进行清理和整理,确保扫描区域无障碍物;在钢结构上设置标志点,用于后续点云数据的拼接和定位。
数据采集:使用三维激光扫描仪对异形钢结构进行扫描,获取点云数据。在扫描过程中,需要根据钢结构的形状和复杂程度,合理规划扫描路线和扫描站点,确保数据的完整性和准确性。
数据处理:对采集到的点云数据进行去噪、滤波、拼接等处理,去除无效数据和噪声点,将不同扫描站点获取的点云数据拼接成一个完整的三维模型。
模型构建与分析:基于处理后的点云数据,构建异形钢结构的三维模型。可以对模型进行尺寸测量、变形分析、碰撞检测等,为工程决策提供依据。
挑战与解决方案
数据量大:异形钢结构三维激光扫描产生的点云数据量通常非常大,给数据存储、处理和分析带来了挑战。解决方案包括采用高效的数据压缩算法、分布式存储和计算技术,以及专业的点云处理软件。
复杂结构扫描困难:对于一些结构复杂、遮挡严重的异形钢结构,扫描难度较大,可能导致部分区域数据缺失。可以采用多角度扫描、增加扫描站点、使用辅助设备(如反射镜)等方法,提高扫描的完整性和准确性。
精度控制:在扫描过程中,环境因素(如温度、湿度、光照等)和扫描仪自身的误差可能会影响测量精度。需要进行精度校准和环境补偿,采用高精度的扫描设备和测量方法,确保测量结果的准确性。