船舶三维激光扫描测量
发布时间:2025-09-11 17:15:26/ 访问次数:0
船舶三维激光扫描测量技术解析
一、技术原理与核心设备
三维激光扫描技术基于激光测距原理,通过发射脉冲激光束并计算反射信号的时间差或相位差,获取目标表面点的三维坐标信息。其核心设备包括:
地面式扫描仪(如FARO Focus、徕卡P50):
适用于开阔环境下的高精度测量,精度可达亚毫米级,支持船体分段检测、总装精度控制。
案例:某大型集装箱船压载水系统改造中,使用FARO大空间扫描仪2天内完成全船压载舱扫描,生成三维模型后优化管道布局,改造周期缩短30%。
手持式扫描仪:
便携性强,适合复杂舱室、管路等狭小空间的快速扫描。
案例:手持式扫描仪快速获取客舱、公共区域三维数据,辅助设计师优化空间布局与装饰方案。
无人机载扫描系统:
用于船体外部曲面、上层建筑的大范围快速建模,提升外轮廓测量效率。
船载移动扫描系统:
集成GPS、IMU(惯性测量单元)和激光雷达,通过航迹推算和坐标解算,实现航道、港口等大范围水域的三维建模。
精度验证:某河道实验中,平面精度和高程精度均在9cm内,满足行业标准要求。

二、核心应用场景
船舶设计与制造
逆向工程:扫描现有船型获取三维数据,辅助新船型优化设计,缩短研发周期。
分段精度检测:对比设计模型与实际建造数据,实时修正偏差。例如,某货轮机舱扫描发现管道安装偏差超限,及时调整施工方案,工期缩短50%。
总装模拟:通过虚拟装配提前发现干涉问题,减少返工成本。
船舶维修与改造
腐蚀与变形监测:定期扫描对比历史数据,评估船体结构健康状态。例如,扫描货油舱内壁发现局部腐蚀速率异常,提前安排维修,避免事故风险。
压载水系统改造:快速获取舱室内部管道布局,优化新系统安装方案。
数字化存档:建立老旧船舶的数字孪生模型,为维修改造提供基础数据。
港口与水域管理
基于船舶三维数据生成高精度海图和港口地图,辅助航道规划与水域管理。
船舶安全与导航
建立基于点云数据的碰撞预警系统,提升航行安全性。例如,数字化试箱技术通过模拟分析导轨、底锥位置关系,出具最佳安装方案,减少船坞资源占用。

三、技术优势
高精度与高效率
单站扫描时间短,数据采集全面,毫米级精度满足船舶制造严苛要求。例如,某项目偏差分析准确率达98%,避免返工损失。
非接触式测量避免对船体结构的物理接触,适合复杂曲面和敏感区域。
全生命周期管理
从设计、建造到运维,提供连续的数字化数据支持。例如,定期扫描货轮建立数字化档案,记录各时期状态,便于检修监测。
安全性提升
非接触式数据获取减少人员与船舶的直接接触,降低安全风险。
四、技术挑战与解决方案
数据处理复杂
挑战:海量点云数据需专业软件处理,对硬件配置要求高。
方案:采用分块扫描、简化算法或云计算平台加速处理。例如,某15万平方米厂房的点云数据通过云计算处理,效率提升60%。
环境干扰
挑战:强光、振动、潮湿等环境可能影响扫描精度。
方案:调整扫描参数(如分辨率、采样密度),或结合多传感器融合技术(如激光雷达+摄影测量)提升数据完整性。
成本投入
挑战:高端设备及软件授权费用较高,中小船厂应用门槛较高。
方案:根据项目需求选择设备(如狭小空间优先手持式扫描仪),或采用租赁模式降低成本。
五、典型案例分析
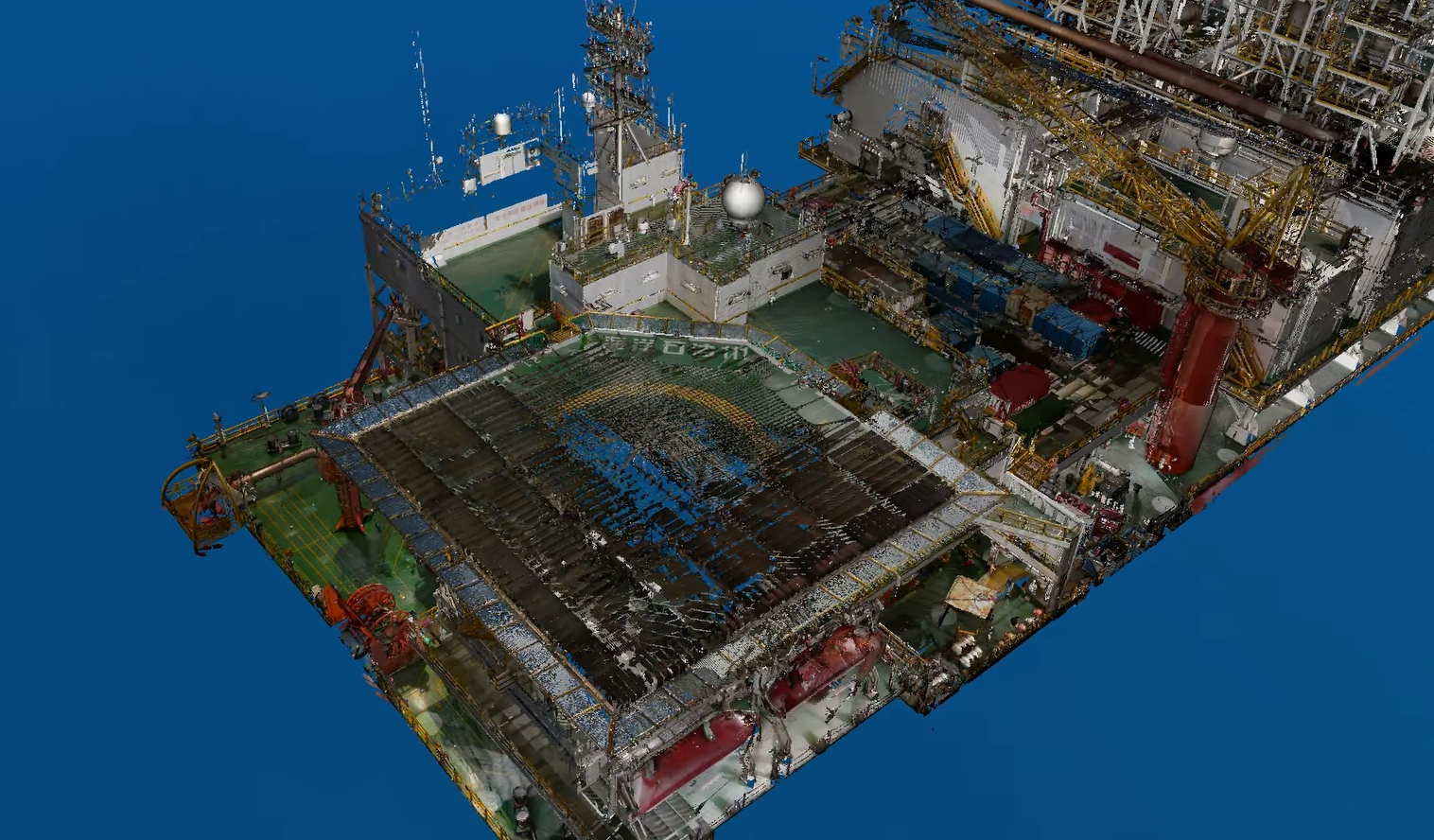
货轮机舱改造项目
背景:机舱结构复杂,传统测量难以全面获取数据。
实施:使用地面式扫描仪多站点扫描,设置标靶球确保拼接精度,通过点云处理软件生成三维模型。
成果:发现管道安装偏差超限,调整施工方案后工期缩短50%,偏差分析准确率98%。
船舶压载水系统改造
背景:需快速获取舱室内部管道布局。
实施:使用FARO大空间扫描仪2天内完成全船压载舱扫描,生成三维模型后优化管道布局。
成果:改造周期缩短30%,降低施工成本。
船载移动扫描系统应用
背景:河道测绘需求增长。
实施:集成GPS、IMU和激光雷达,通过航迹推算和坐标解算生成三维点云。
成果:平面精度和高程精度均在9cm内,验证系统可靠性。